Processes
Terminology
- Program - code that can be executed.
- A program is a passive entity and generally exists as a file on the disk.
- Process - a program (either user mode or kernel mode) that is being executed.
- A process is an active entity and usually resides in memory.
- Process state - Each process has information associated with it such as opened files,
registers in use, memory allocated, duration of execution, etc.
- Process states - new, ready, running, blocked, terminated.
- Thread - A subprocess or lightweight process. A process contains one or more threads.
- One thread - one live (executing) function
- Multiple threads - multiple live (executing) functions
- CPU burst - A period of uninterrupted CPU activity.
- I/O burst - A period of waiting for I/O to complete.
- CPU-bound vs. I/O-bound - The limiting factor during the execution of a process.
- Single tasking OS - An OS that has one process in memory at once.
- Multi-tasking OS - An OS that has more than one process in memory at the same time.
- Parallelism - The ability to execute more than one process at the same time. Must have
multiple CPUs or multiple cores.
- Pseudo-parallelism - The ability for a single-CPU/single-core machine to give the
illusion of executing more than one process/thread simultaneously.
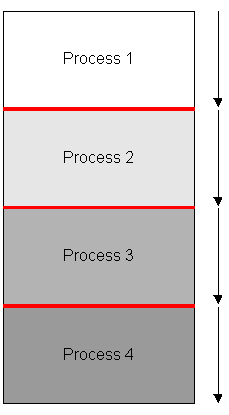
- Diagrams showing parallelism vs. pseudo-parallelism
- The RED LINE represents the time to switch between processes:
| No parallelism | | Pseudo-parallelism |
|---|
|
|

|
| Pseudo-parallelism (detail) |
|---|

|
| Parallelism |
|---|

|
How long does it take for each process to finish? How about all processes?
Process States
There are several states in which a process can be. They are mutually-exclusive, so a process can
only be in exactly one of these states at any given time:
- New (Created) - The process is being created. (A process is essentially a data structure.)
- Ready - The process is in the ready (runnable) queue and is waiting to run on the CPU. (Short-lived or long-lived, depending on system load.)
- Running - The process is actively using the CPU and other resources. (Generally very short-lived.)
- Blocked - The process is currently waiting (paused) for some I/O to complete or an event
to happen. (Generally long-lived.)
- Terminated - The process has been terminated, either because it has finished its task or
because the system (or user) has terminated it. (Could be short-lived or very long-lived.)
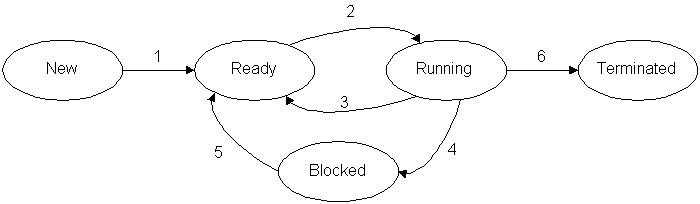
State Transitions
- (Admitted) The process has been created and is now being put into the ready/runnable queue.
- (Dispatched) The OS (scheduler) has selected a process to run and is executing it on the CPU.
- (Timeout) The process has used up its allotted time slice and is put back into the ready queue for later execution.
- The process may still have time remaining in its time slice, but a higher-priority process has preempted it.
- (Need I/O or event to happen) The process has requested I/O or has requested to wait until a future event.
- (I/O done or event occurred) The I/O has completed or event has occurred that the process was waiting on.
The process gets put back in the ready queue.
- (Ending) The process has completed its task or the system has terminated the process.
Utilities like psps,
pstree,
top, htop (on Linux, with GUIs
ksysguard, gnome-system-monitor),
Task ManagerTask Manager and
Process Explorer (on Windows),
and Activity Monitor (on macOS) can give you lots of detailed information
about all of the processes on a computer.
From the ps man page on Linux:
PROCESS STATE CODES
Here are the different values that the s, stat and state output specifiers (header "STAT" or "S") will
display to describe the state of a process.
D Uninterruptible sleep (usually IO)
R Running or runnable (on run queue)
S Interruptible sleep (waiting for an event to complete)
T Stopped, either by a job control signal or because it is being traced.
W paging (not valid since the 2.6.xx kernel)
X dead (should never be seen)
Z Defunct ("zombie") process, terminated but not reaped by its parent.
For BSD formats and when the stat keyword is used, additional characters may be displayed:
< high-priority (not nice to other users)
N low-priority (nice to other users)
L has pages locked into memory (for real-time and custom IO)
s is a session leader
l is multi-threaded (using CLONE_THREAD, like NPTL pthreads do)
+ is in the foreground process group
Sample output running: ps aux in a virtual machine.
Process Control Block (PCB)
Each process has a block of memory (typically a C struct) that contains all of the relevant information
about a process. The PCB can contain a massive amount of information. Some of the info includes:
- Process state - Created, Ready, Running, Blocked, Terminated.
- Program counter - Where to resume the process when it is running again.
- CPU registers - (including instruction pointer) Must remember these to reload later.
- Open files - Any files or other I/O that are opened are listed in the PCB.
- Scheduling info - Priority, time elapsed, etc.
- Lots of other stuff...
Linux task_struct
Linux task_struct (newer) (from kernel 5.4.0 sched.h)
The PCBs are kept on a linked-list structure that represents a queue for various devices (CPU, disk, etc.)
 |
| Operating System Concepts - 8th Edition Silberschatz, Galvin, Gagne ©2009 |
- The OS must schedule processes (jobs) for execution
- User processes
- System processes
- Scheduling constraints
- Waiting time: jobs should be started quickly when they're ready
- CPU utilization: keep the CPU busy
- Response time: jobs should provide feedback quickly
- Turnaround time: jobs should to be completed in a timely manner
- Prioritization: certain tasks might be more important than others
Types of Scheduling
- Queueing (non-preemptive scheduling)
- Jobs are placed on a queue for sequential execution.
- Two type of queues used
- First In, First Out (FIFO) queue
- Shortest Job First (SJF) queue
- Used for batch jobs (such as printing).
- Round-RobinRound-Robin
(preemptivepreemptive scheduling).
- Each process is given a (short, a few milliseconds) time slice.
- A process executes only for that time slice.
- After the time slice is over, the next process gets a turn.
- We will look at scheduling algorithms in more detail later.
Context Switching
- A context switchcontext switch is when the OS switches between processes.
- In round robin scheduling, the OS must switch often between processes.
(Overhead)
- Process's information is read in from its PCB
- Timer is reset
- Execution of that process (re)starts
- If process terminates before timer expires:
- Remove the PCB from the list of scheduled jobs
- Otherwise:
- After a process's time slice is up (timer expires), the current process's information is saved in a PCB
- Process is put back into the ready queue
- Go to next process in list
- Repeat ad infinitum
- Use perf to measure performance.
Process Creation
- To execute a program:
- A PCB is created
- A unique process ID (PID) is assigned
- A process priority is assigned
- Optional: New program is loaded from disk to memory
- May just continue to run the same program in new process.
- Process placed in the run queue
- An existing process creates a new process
- Parent: existing process
- Child: newly-created process
- A child process can also create one or more processes (the child becomes the parent of these new processes)
- Technically, all processes except the init process are child processes.
The POSIX fork Function
- The forkfork function splits the flow of execution into two paths.
- Parent process
- Child process
- The return value from the function depends on the process.
- 0, if the process is the child process
- PID of the child, if the process is the parent process
- -1, on failure (ALWAYS be prepared to deal with this situation.)
- The child must call the exit system call (either directly or indirectly) when it finishes
execution.
- The parent typically uses a wait function to wait until the child terminates.
fork Example A (forkA.c)
#include <stdio.h> /* printf */
#include <unistd.h> /* fork, getpid, getppid */
int main(void)
{
/* Print out process ID and parent's process ID */
printf("Starting... (PID: %i, PPID: %i)\n", getpid(), getppid());
/* Create a clone of ourself */
fork();
/* Print our PID and PPID */
printf("After fork. (PID: %i, PPID: %i)\n", getpid(), getppid());
return 0;
}
| Output 1 | | Output 2 | | Output 3 |
|---|
Starting... (PID: 22561, PPID: 21955)
After fork. (PID: 22561, PPID: 21955)
After fork. (PID: 22562, PPID: 22561)
|
|
Starting... (PID: 22633, PPID: 21955)
After fork. (PID: 22633, PPID: 21955)
After fork. (PID: 22634, PPID: 22633)
|
|
Starting... (PID: 22638, PPID: 21955)
After fork. (PID: 22638, PPID: 21955)
After fork. (PID: 22639, PPID: 22638)
|
You can see that the first process has a parent PID of 21955 (the shell) and the
second process has a parent PID of 22561, which is the PID of the first process.
To get the PID of the BASH shell, type:
echo $BASHPID
from the command line. Here's a snippet from the output of pstree
from the third run of the program (including the PIDs):
init─┬─ModemManager───2*[{ModemManager}]
├─NetworkManager─┬─dhclient
│ ├─dnsmasq
│ └─3*[{NetworkManager}]
├─acpid
├─bluetoothd
├─master─┬─pickup
│ └─qmgr
├─mdadm
├─mdm───mdm─┬─Xorg
│ └─init─┬─VBoxSVC───15*[{VBoxSVC}]
│ ├─VBoxXPCOMIPCD
│ ├─dbus-daemon
│ ├─kalarm───{kalarm}
│ ├─kdeconnectd───{kdeconnectd}
│ ├─kded4───5*[{kded4}]
│ ├─kdeinit4─┬─/usr/bin/termin─┬─6*[bash]
│ │ │ ├─bash───bash───yapp.exe───3*[{yapp.exe}]
│ │ │ ├─bash(21955)───forkA(22638)───forkA(22639)
│ │ │ ├─bash───pstree
│ │ │ ├─bash───ssh
│ │ │ ├─gnome-pty-helpe
│ │ │ └─3*[{/usr/bin/termin}]
│ │ ├─3*[/usr/bin/termin─┬─bash]
│ │ │ ├─gnome-pty-helpe]
│ │ │ └─3*[{/usr/bin/termin}]]
│ │ ├─/usr/bin/termin─┬─3*[bash]
│ │ │ ├─bash───bash───ssh
│ │ │ ├─gnome-pty-helpe
│ │ │ └─3*[{/usr/bin/termin}]
This is the process hierarchy:
init → mdm → mdm → init → kdeinit4 → terminator → bash → forkA → forkA
This briefly describes what the processes are:
| Process | | Description | | Purpose |
|---|
| |
| init | | Upstart process management daemon | | boot |
| mdm | | The MDM display manager | | login screen |
| kdeinit4 | | KDE process launcher | | desktop |
| terminator | | Mulitple GNOME terminals | | graphical terminal |
| bash | | GNU Bourne-Again shell | | shell |
| forkA | | Our program | | our program |
Of course forking (cloning) a process alone is not very useful. We typically want the
newly-created process (the child) to do something different from the original process (the parent),
as the process hierarchy above shows.
A second fork Example (fork.c) This shows how we can detect
which process is the parent (original) and which is the child (clone):
| Actual Code | | Child (conceptually) | | Parent (conceptually) |
#include <stdio.h> /* printf */
#include <stdlib.h> /* exit */
#include <unistd.h> /* fork, getpid, sleep */
#include <sys/wait.h> /* wait */
int main(void)
{
int i, pid;
pid = getpid();
printf("parent pid = %i\n", pid);
pid = fork();
if (pid == 0) /* child process is always 0 */
{
for (i = 0; i < 10; i++)
{
printf("child process: %i\n",i);
sleep(1);
}
printf("child exiting\n");
exit(0);
}
else /* parent is non-zero (child's pid) */
{
printf("child pid = %i\n", pid);
printf("waiting for child\n");
wait(NULL);
printf("child terminated\n");
}
printf("parent exiting\n");
return 0;
}
|
|
/* child process is always 0 */
if (pid == 0)
{
for (i = 0; i < 10; i++)
{
printf("child process: %i\n",i);
sleep(1);
}
printf("child exiting\n");
exit(0);
}
/* parent is non-zero (child's pid) */
else
{
printf("child pid = %i\n", pid);
printf("waiting for child\n");
wait(NULL)
printf("child terminated\n");
}
printf("parent exiting\n");
return 0;
}
|
|
/* child process is always 0 */
if (pid == 0)
{
for (i = 0; i < 10; i++)
{
printf("child process: %i\n",i);
sleep(1);
}
printf("child exiting\n");
exit(0);
}
/* parent is non-zero (child's pid) */
else
{
printf("child pid = %i\n", pid);
printf("waiting for child\n");
wait(NULL);
printf("child terminated\n");
}
printf("parent exiting\n");
return 0;
}
|
Running the program 3 times. The child's output is in red:
| Output 1 | | Output 2 | | Output 3 |
|---|
parent pid = 464
child pid = 3688
child process: 0
waiting for child
child process: 1
child process: 2
child process: 3
child process: 4
child process: 5
child process: 6
child process: 7
child process: 8
child process: 9
child exiting
child terminated
parent exiting
|
|
parent pid = 3936
child pid = 2756
waiting for child
child process: 0
child process: 1
child process: 2
child process: 3
child process: 4
child process: 5
child process: 6
child process: 7
child process: 8
child process: 9
child exiting
child terminated
parent exiting
|
|
parent pid = 2180
child pid = 212
waiting for child
child process: 0
child process: 1
child process: 2
child process: 3
child process: 4
child process: 5
child process: 6
child process: 7
child process: 8
child process: 9
child exiting
child terminated
parent exiting
|
In normal, production code (read: homework assignments), you will want to handle failures
(which are not uncommon):
pid = fork();
if (pid == 0) /* child process is always 0 */
{
/* do child stuff */
}
else if (pid > 0) /* parent process is non-zero (child's pid) */
{
/* do parent stuff */
}
else /* fork failed, pid is -1 */
{
/* handle error */
}
It's important to realize that nothing is shared between the parent and child after the fork call: (fork3.c)
#include <stdio.h> /* printf */
#include <stdlib.h> /* exit */
#include <string.h> /* strcpy */
#include <unistd.h> /* fork, getpid, sleep */
#include <sys/wait.h> /* wait */
int main(void)
{
int pid;
char buffer[100] = "Shared data";
pid = getpid();
printf("parent: pid = %i\n", pid);
pid = fork();
if (pid == 0) /* child process is always 0 */
{
printf("child: buffer is %s\n", buffer);
strcpy(buffer, "Child data");
printf("child: buffer is %s\n", buffer);
printf("child: child exiting\n");
exit(0);
}
else /* parent process is non-zero (child's pid) */
{
sleep(1);
printf("parent: child pid = %i\n", pid);
printf("parent: waiting for child\n");
wait(NULL);
printf("parent: child terminated\n");
printf("parent: buffer is %s\n", buffer);
}
printf("parent: parent exiting\n");
return 0;
}
Output:
parent: pid = 1396
child: buffer is Shared data
child: buffer is Child data
child: child exiting
parent: child pid = 936
parent: waiting for child
parent: child terminated
parent: buffer is Shared data
parent: parent exiting
Retrieving the exit code from the child: (fork-status.c)
#include <stdio.h> /* printf */
#include <stdlib.h> /* exit */
#include <unistd.h> /* fork, getpid */
#include <sys/wait.h> /* wait */
int main(void)
{
int pid;
pid = fork();
if (pid == 0) /* child */
{
exit(123); /* same as return 123; */
}
else /* parent */
{
int status;
wait(&status);
if (WIFEXITED(status))
{
int code = WEXITSTATUS(status); /* extract 8-bit exit code */
printf("child terminated with value %i\n", code);
}
}
return 0;
}
Output:
child terminated with value 123
Note that the only values you can return to the parent this way are 0 to 255 (an unsigned char)
and you must use the macro WIFEXITED to check first.
Abnormal child exit: (fork-status2.c) Don't compile with optimizations.
/* DO NOT compile with optimizations enabled! */
#include <stdio.h> /* printf, stdout */
#include <stdlib.h> /* exit */
#include <unistd.h> /* fork, getpid */
#include <sys/wait.h> /* wait */
int main(void)
{
int pid;
pid = fork();
if (pid == 0) /* child */
{
int x;
printf("child pid: %i\n", getpid());
sleep(10); /* give user a chance to send a signal */
/* Uncomment one of these to see what happens */
//x = 3 / pid; /* SIGFPE, divide by zero */
//abort(); /* SIGABRT, abort the program */
//x = *(int *)0xFFFFFFF; /* SIGSEGV, dereference arbitrary address */
exit(123); /* normal exit, code retrieved by parent */
}
else /* parent */
{
int exit_code;
int status;
wait(&status);
printf("child terminated with value %08X, %i\n", status, status); /* raw value */
exit_code = WEXITSTATUS(status); /* extract exit code */
if (WIFEXITED(status)) /* normal exit */
printf("child terminated normally with exit code %i\n", exit_code);
else /* abnormal exit */
printf("child terminated abnormally, code: %i\n", exit_code);
}
return 0;
}
Output: (normal exit)
child pid: 1328
child terminated with value 00007B00, 31488
child terminated normally with exit code 123
Output: (divide by zero)
child pid: 1535
child terminated with value 00000008, 8
child terminated abnormally, code: 0
This value is the
signal that was sent
to the application:
1) SIGHUP 2) SIGINT 3) SIGQUIT 4) SIGILL 5) SIGTRAP
6) SIGABRT 7) SIGBUS 8) SIGFPE 9) SIGKILL 10) SIGUSR1
11) SIGSEGV 12) SIGUSR2 13) SIGPIPE 14) SIGALRM 15) SIGTERM
16) SIGSTKFLT 17) SIGCHLD 18) SIGCONT 19) SIGSTOP 20) SIGTSTP
21) SIGTTIN 22) SIGTTOU 23) SIGURG 24) SIGXCPU 25) SIGXFSZ
26) SIGVTALRM 27) SIGPROF 28) SIGWINCH 29) SIGIO 30) SIGPWR
31) SIGSYS 34) SIGRTMIN 35) SIGRTMIN+1 36) SIGRTMIN+2 37) SIGRTMIN+3
38) SIGRTMIN+4 39) SIGRTMIN+5 40) SIGRTMIN+6 41) SIGRTMIN+7 42) SIGRTMIN+8
43) SIGRTMIN+9 44) SIGRTMIN+10 45) SIGRTMIN+11 46) SIGRTMIN+12 47) SIGRTMIN+13
48) SIGRTMIN+14 49) SIGRTMIN+15 50) SIGRTMAX-14 51) SIGRTMAX-13 52) SIGRTMAX-12
53) SIGRTMAX-11 54) SIGRTMAX-10 55) SIGRTMAX-9 56) SIGRTMAX-8 57) SIGRTMAX-7
58) SIGRTMAX-6 59) SIGRTMAX-5 60) SIGRTMAX-4 61) SIGRTMAX-3 62) SIGRTMAX-2
63) SIGRTMAX-1 64) SIGRTMAX
Send some other signal to the child while it's sleeping and see the result.
Why does it say Don't compile with optimizations?
Waiting for multiple children #1: (fork-multiwait.c)
#include <stdio.h> /* printf */
#include <stdlib.h> /* exit */
#include <unistd.h> /* fork, getpid, sleep */
#include <sys/wait.h> /* wait, waitpid */
/* Doesn't return */
void dochild(int count)
{
int pid = getpid();
printf("[%i] child process\n", pid);
sleep(count);
printf("[%i] child exiting\n", pid);
exit(count * 10);
}
int main(void)
{
int i, cpid[3];
int ppid = getpid();
printf("parent pid = %i\n", ppid);
cpid[0] = fork();
if (cpid[0] == 0) /* child process is always 0 */
dochild(1);
cpid[1] = fork();
if (cpid[1] == 0) /* child process is always 0 */
dochild(2);
cpid[2] = fork();
if (cpid[2] == 0) /* child process is always 0 */
dochild(3);
/* parent process is non-zero (child's pid) */
printf("waiting for children\n");
for (i = 0; i < 3; i++)
{
int status;
printf("waiting for child pid: %i\n", cpid[i]);
waitpid(cpid[i], &status, 0);
if (WIFEXITED(status))
printf("[%i] child ended normally: %i\n", cpid[i], WEXITSTATUS(status));
else
printf("[%i] child ended abnormally\n", cpid[i]);
}
printf("children terminated\n");
printf("parent exiting\n");
return 0;
}
| Output 1 | | Output 2 | | Output 3 |
|---|
parent pid = 1736
[2496] child process
[3640] child process
[2176] child process
waiting for children
waiting for child pid: 2496
[2496] child exiting
[2496] child ended normally: 10
waiting for child pid: 3640
[3640] child exiting
[3640] child ended normally: 20
waiting for child pid: 2176
[2176] child exiting
[2176] child ended normally: 30
children terminated
parent exiting
|
|
parent pid = 3364
[1308] child process
[2240] child process
waiting for children
waiting for child pid: 1308
[2364] child process
[1308] child exiting
[1308] child ended normally: 10
waiting for child pid: 2240
[2240] child exiting
[2240] child ended normally: 20
waiting for child pid: 2364
[2364] child exiting
[2364] child ended normally: 30
children terminated
parent exiting
|
|
parent pid = 3188
[2420] child process
[3620] child process
waiting for children
[2084] child process
waiting for child pid: 2420
[2420] child exiting
[2420] child ended normally: 10
waiting for child pid: 3620
[3620] child exiting
[3620] child ended normally: 20
waiting for child pid: 2084
[2084] child exiting
[2084] child ended normally: 30
children terminated
parent exiting
|
There are a few things about the above program that need to be discussed.
- The output may be different each time the program is run.
- The children will always be waited for in order and the parent will always print:
child ended normally: 10
child ended normally: 20
child ended normally: 30
- The parent is blocked until the first child (cpid[0]) finishes.
- What if the other children finish first?
- Call waitpid with -1 to wait on any child, not a particular one.
- Returns the pid of the child that finished.
- What if the parent needs to do other work in parallel with the children?
- Add this code to dochild (before exit) to see what happens:
if (count == 3)
abort();
- The scheduler decides when to run the child. Default is to run the parent first.
cat /proc/sys/kernel/sched_child_runs_first
Setting it to a non-zero value will tell the scheduler to favor the child over the parent.
- The children may run in a different order than their creation order.
Waiting for multiple children #2: (fork-multiwait1.c)
#include <stdio.h> /* fprintf, stdout */
#include <stdlib.h> /* exit */
#include <unistd.h> /* fork, getpid */
#include <sys/wait.h> /* wait, waitpid */
void dochild(int count)
{
int pid = getpid();
fprintf(stdout,"[%i] child process\n", pid);
fprintf(stdout, "[%i] child exiting\n", pid);
exit(count * 10);
}
int main(void)
{
int i, cpid[3];
int ppid = getpid();
fprintf(stdout, "parent pid = %d\n", ppid);
cpid[0] = fork();
if (cpid[0] == 0) /* child process is always 0 */
dochild(1);
cpid[1] = fork();
if (cpid[1] == 0) /* child process is always 0 */
dochild(2);
cpid[2] = fork();
if (cpid[2] == 0) /* child process is always 0 */
dochild(3);
/* parent process is non-zero (child's pid) */
fprintf(stdout, "waiting for children\n");
for (i = 0; i < 3; i++)
{
int status, pid;
fprintf(stdout, "waiting for child pid: %d\n", cpid[i]);
/* Wait for any child to finish */
pid = waitpid(-1, &status, 0);
if (WIFEXITED(status))
fprintf(stdout, "[%i] child ended normally: %i\n", pid, WEXITSTATUS(status));
else
fprintf(stdout, "[%i] child ended abnormally, status: %i\n", pid, status);
}
fprintf(stdout, "children terminated\n");
fprintf(stdout, "parent exiting\n");
return 0;
}
| Output 1 | | Output 2 | | Output 3 |
|---|
parent pid = 24634
[24635] child process
[24635] child exiting
waiting for children
waiting for child pid: 24635
[24637] child process
[24636] child process
[24637] child exiting
[24635] child ended normally: 10
[24636] child exiting
waiting for child pid: 24636
[24636] child ended normally: 20
waiting for child pid: 24637
[24637] child ended normally: 30
children terminated
parent exiting
|
|
parent pid = 24700
waiting for children
[24701] child process
waiting for child pid: 24701
[24702] child process
[24703] child process
[24703] child exiting
[24701] child exiting
[24702] child exiting
[24701] child ended normally: 10
waiting for child pid: 24702
[24703] child ended normally: 30
waiting for child pid: 24703
[24702] child ended normally: 20
children terminated
parent exiting
|
|
parent pid = 24748
[24749] child process
waiting for children
[24750] child process
[24750] child exiting
[24749] child exiting
waiting for child pid: 24749
[24750] child ended normally: 20
waiting for child pid: 24750
[24751] child process
[24751] child exiting
[24749] child ended normally: 10
waiting for child pid: 24751
[24751] child ended normally: 30
children terminated
parent exiting
|
A few points to make:
- The order that the children are waited for is indeterminant.
- Just because one child starts first doesn't mean it will finish first.
More examples.
You may recall that, for efficiency reasons, data written to stdout (e.g. via printf),
is buffered. This means that instead of printf writing each byte individually to the
output, entire lines are written at once. This can be a significant performance improvement.
There are two major types of buffering: line buffering and full buffering. stdout is
line-buffered, which means that when a newline is encountered, all of the bytes up to and including
the newline are then written to
stdout. The implications of this are, for example, if you were writing output using
printf and your program crashed before printf encountered the newline, some
bytes may never have made it to the screen.
This behavior may lead to some surprises when a parent and child process are both writing
buffered output to stdout. Some examples will demonstrate.
Here is a very simple example. (fork-redirect.c)
#include <stdio.h> /* printf */
#include <stdlib.h> /* exit */
#include <unistd.h> /* fork, getpid */
#include <sys/wait.h> /* wait */
int main(void)
{
int pid;
/* The text will be sent to the output when the newline is encountered. */
printf("This should only print once. (%i)\n", getpid());
pid = fork();
if(pid == 0)
{
printf("This is the child (pid: %i).\n", getpid());
exit(123);
}
else if (pid > 0)
{
wait(NULL);
printf("This is the parent (pid: %i).\n", getpid());
}
else
printf("Fork failed.\n");
return 0;
}
This is the output (as expected):
This should only print once. (9206)
This is the child (pid: 9207).
This is the parent (pid: 9206).
Now, let's remove the newline from the first print statement and see what the output looks like.
We're changing this:
/* The text will be sent to the output when the newline is encountered. */
printf("This should only print once. (%i)\n", getpid());
to this:
/* There is no newline, so the text won't be sent until the buffer is full. */
printf("This should only print once. (%i)", getpid());
Running the program now shows this output:
This should only print once. (9436)This is the child (pid: 9437).
This should only print once. (9436)This is the parent (pid: 9436).
The first thing to notice is that there is no newline after the first line prints. This is
expected, of course, since we removed it. However, you'll notice that the first line is now printed
twice. One line is printed in the parent and the other is printed in the child.
Why is that?
This is the result of line-buffered output:
- The parent process sends the text to printf without a newline. (The text is buffered.)
- The text is NOT sent to stdout because a newline hasn't been seen
(and the buffer is not full).
- The fork call is made which duplicates the entire process.
- This means that the output buffer is duplicated in the child,
including the current contents of the buffer.
- The printf call is made in the child, which includes a newline.
- The newline causes the entire buffer to be flushed sending all of the text
(first printf and child printf) to the output.
- The printf call is made in the parent, which includes a newline.
- The newline causes the entire buffer to be flushed sending all of the text
(first printf and parent printf) to the output.
We saw this here.
The result is that the first line is seen twice. Steps 4 and 5 could
be swapped if you have a situation where the parent code happened
to run before the child code did.
So, how do we "fix" that?
One solution is to make sure to flush the buffer before calling fork. This ensures
that the contents are sent to the output before creating the child process. Placing this
code after the first printf and before the fork:
fflush(stdout);
Now, we see this as the output:
This should only print once. (9817)This is the child (pid: 9818).
This is the parent (pid: 9817).
There is still no newline after the first line (expected), but the line is only sent
once to the output.
Another solution is to turn off buffering for stdout using setvbuf:
int setvbuf (FILE *stream, char *buf, int mode, size_t size);
Add this line of code before calling printf:
setvbuf(stdout, NULL, _IONBF, 0);
The third parameter is the intesting one and can be one of three:
- _IOFBF - causes input/output to be fully buffered
- _IOLBF - causes input/output to be line buffered
- _IONBF - causes input/output to be unbuffered (buf and size are ignored)
See the man page (linked above) for more details. Now, when we run the program, the line
is only printed once. Keep in mind that disabling buffering may have a negative
impact on the performance. However, when printing to the screen, this is usually not a problem.
The example above shows how this "problem" is the result of not printing a new line. However,
there is still a problem when you do print the newline. It occurs when you redirect the output
to a file.
Suppose we put the newline back into the printf statement:
/* The text will be sent to the output when the newline is encountered. */
printf("This should only print once. (%i)\n", getpid());
We saw that this no longer caused the text to be printed twice (once in the parent and once in the child).
However, if you were to run the program and redirect the output to file:
./fork-redirect > out.txt
this is what you would see in the file:
This should only print once. (18897)
This is the child (pid: 18899).
This should only print once. (18897)
This is the parent (pid: 18897).
We're back to the same problem we had without the newline. So, why is this?
It turns out that, when you redirect stdout, the OS (or shell) is setting up a pipe.
(Much like the pipes you've been using at the command line). Instead of being line-buffered,
the pipe is fully-buffered, which means that the output is only sent to stdout when the buffer
is full. It doesn't matter if there are newlines in the text or not.
The solution is the same as before. Either you can flush the buffer before the fork, or you can
set stdout back to line-buffered (or even no buffering). Either of these will do the trick:
setvbuf(stdout, NULL, _IOLBF, 0); /* line-buffered */
or
setvbuf(stdout, NULL, _IONBF, 0); /* no buffering */
The recommended approach is to just use fflush when you need to make sure the buffer is
sent to the output. It's easier to use and understand (most students and beginners have never heard
of setvbuf). It's also more efficient because it only affects the last printf statement,
not every printf statement.
- Isn't forking an entire process expensive? In a word, no.
- Usually, the child process will replace itself by calling one of the
exec functions.
- These functions are just wrappers around the
execve function:
int execl(const char *path, const char *arg, ...);
int execlp(const char *file, const char *arg, ...);
int execle(const char *path, const char *arg, ...);
int execv(const char *path, char *const argv[]);
int execvp(const char *file, char *const argv[]);
int execvpe(const char *file, char *const argv[], char *const envp[]);
- l - list (The function takes a list of args, i.e. variadic.)
- v - vector (The function takes an array.)
- p - path (The PATH is searched for the executable.)
- e - environment (The environment is included.)
- For security reasons, you should only use execl and execv.
- This function will load and execute another file from the disk.
- There are several different versions of this function. (We may have looked at some of them in CS120)
- Command line arguments from getopt notes
- Command line arguments and Environment from CS120 notes
- Example: (exec.c, assumes that geany is installed in /usr/bin)
| execl (variadic list) | | execv (array) |
|---|
#include <stdio.h> /* printf */
#include <stdlib.h> /* exit */
#include <unistd.h> /* fork, getpid */
#include <sys/wait.h> /* wait */
int main(void)
{
int pid;
pid = fork();
if (pid == 0) /* child */
{
printf("child: executing a program...\n");
execl("/usr/bin/geany", "geany", "execl.c", "execv.c", NULL);
printf("child: if you see this, the exec failed\n");
perror("geany");
exit(10); /* arbitrary exit code */
}
else /* parent */
{
int code, status;
printf("parent: waiting for child to terminate\n");
wait(&status);
code = WEXITSTATUS(status);
printf("parent: child terminated with value %i\n", code);
}
return 0;
}
|
|
#include <stdio.h> /* printf */
#include <stdlib.h> /* exit */
#include <unistd.h> /* fork, getpid */
#include <sys/wait.h> /* wait */
int main(void)
{
int pid;
pid = fork();
if (pid == 0) /* child */
{
char *args[] = {"geany", "execl.c", "execv.c", NULL};
printf("child: executing a program...\n");
execv("/usr/bin/geany", args);
printf("child: if you see this, the exec failed\n");
perror("geany");
exit(10); /* arbitrary exit code */
}
else /* parent */
{
int code, status;
printf("parent: waiting for child to terminate\n");
wait(&status);
code = WEXITSTATUS(status);
printf("parent: child terminated with value %i\n", code);
}
return 0;
}
|
Output:
parent: waiting for child to terminate
child: executing a program...
parent: child terminated with value 0
VERY IMPORTANT!
It's important to realize the distinction between the program
being executed ("/usr/bin/geany") and argv[0] ("geany"). The
convention is that argv[0] match the name of the executable without the path.
- argv[0] is "geany"
- argv[1] is "execl.c"
- argv[2] is "execv.c"
Changing /usr/bin/geany to /usr/bin/foobar:
Output:
parent: waiting for child to terminate
child: executing a program...
child: if you see this, the exec failed
parent: child terminated with value 10
Another example:
This is the child. It simply prints out its PID and any command line arguments:
#include <stdio.h> /* printf */
#include <unistd.h> /* getpid */
int main(int argc, char **argv)
{
int i;
printf("[%i] new child\n", getpid());
for (i = 0; i < argc; i++)
printf("arg[%i] is %s\n", i, argv[i]);
return 123;
}
And this code exec's the child using both execl and execv:
| execl (variadic list) | | execv (array) |
|---|
#include <stdio.h> /* printf */
#include <stdlib.h> /* exit */
#include <unistd.h> /* fork, getpid, exec */
#include <sys/wait.h> /* wait */
int main(void)
{
int pid;
pid = fork();
if (pid == 0) /* child */
{
printf("child: executing a program via execl ...\n");
/* program 0 1 2 3 4 */
execl("./child", "child", "one", "two", "3", "4 and 5", NULL);
printf("child: if you see this, the exec failed\n");
perror("child");
exit(10); /* arbitrary exit code */
}
else /* parent */
{
int code, status;
printf("parent: waiting for child to terminate\n");
wait(&status);
code = WEXITSTATUS(status);
printf("parent: child terminated with value: %i\n", code);
}
return 0;
}
|
|
#include <stdio.h> /* printf */
#include <stdlib.h> /* exit */
#include <unistd.h> /* fork, getpid */
#include <sys/wait.h> /* wait */
int main(void)
{
int pid;
pid = fork();
if (pid == 0) /* child */
{
/* 0 1 2 3 4 */
char *args[] = {"child", "one", "two", "3", "4 and 5", NULL};
printf("child: executing a program via execv ...\n");
execv("./child", args);
printf("child: if you see this, the exec failed\n");
perror("child");
exit(10); /* arbitrary exit code */
}
else /* parent */
{
int code, status;
printf("parent: waiting for child to terminate\n");
wait(&status);
code = WEXITSTATUS(status);
printf("parent: child terminated with value: %i\n", code);
}
return 0;
}
|
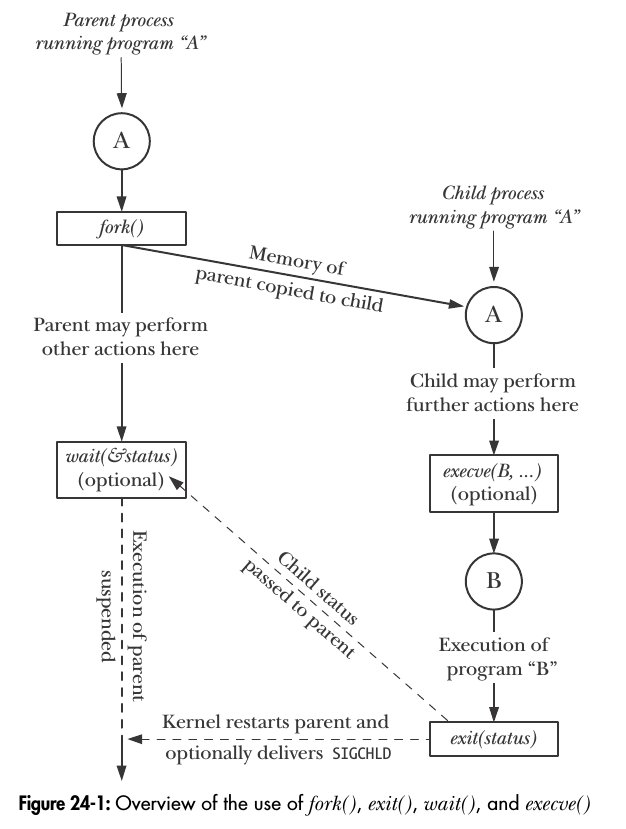
- Diagram of the fork/exec process from
The Linux Programming Interface book.
- To get more information on why exec failed, call perror.
perror("foobar");
prints out:
foobar: No such file or directory
- Another example showing both the list and vector
versions of exec.
- The 'p' versions will search the path for the executable file.
- However, realize that this can be a security issue. It's safer to always specify
the absolute path.
- See execve man page for more information on this family of functions.
- Also, see exec functions
from the CS120 lectures.
- Real World™ use of forking: A watchdog program.
- When a process terminates, it has to return all the resources to the operating system:
- physical and virtual memory is returned (not memory allocated with shmget)
- open files are closed
- I/O buffers are freed
- All other resources are deallocated by the operating system
- The process terminates either voluntarily or involuntarily.
- When one of the following conditions exists, the process terminates:
- Normal exit (voluntary)
- Error exit (voluntary)
- Fatal error (involuntary)
- Killed by another process (involuntary)
Voluntary exits:
- Normal exits:
- A process terminates when it finishes executing its final statement and asks the operating system to delete it. (Example: A process finished all of its work.)
- A normal exit in Unix is implemented via the exit call. (If you don't call exit, it will be called for you.)
After exit(), the exit status must be transmitted to the parent process. There are three cases. If the parent has set SA_NOCLDWAIT,
or has set the SIGCHLD handler to SIG_IGN, the status is discarded. If the parent was waiting on the child it is notified of the exit status.
In both cases the exiting process dies immediately. If the parent has not indicated that it is not interested in the exit status, but is not
waiting, the exiting process turns into a "zombie" process (which is nothing but a container for the single byte representing the exit status)
so that the parent can learn the exit status when it later calls one of the wait() functions.
- In Windows a normal exit is via the ExitProcess call. (If you don't call ExitProcess, it will be called for you.)
- Error exits:
- When a process discovers a fatal error forcing the process to terminate.
- For example, the process running the compiler might exit when it discovers that a source file is missing.
Involuntary exits:
- When the running process causes an error due to a program bug, the process is terminated:
- The process has exceeded the usage of the allocated resources.
- The process executes an illegal instruction.
- The process is referencing a nonexistent memory or illegal memory.
- Dividing by zero.
- Etc...
- When a process, (usually a parent process) decides to terminate or kill a running process:
Miscellaneous:
- The watchdog program.
- A program to demonstrate the "zombie" state:
#include <stdio.h> /* printf, perror */
#include <stdlib.h> /* exit */
#include <unistd.h> /* fork, getpid, sleep */
#include <sys/wait.h> /* wait */
int main(void)
{
int i, pid;
pid = fork();
if (pid == 0) /* child process is always 0 */
{
printf("child: PID: %i, parent PID: %i\n", getpid(), getppid());
printf("child: exiting...\n");
sleep(3);
exit(0);
}
else if (pid > 0) /* parent process is non-zero (child's pid) */
{
sleep(10); /* The child will be a zombie for 7 seconds */
wait(NULL);
printf("parent: PID: %i, waiting for child pid: %d\n", getpid(), pid);
printf("parent: child terminated\n");
sleep(5);
}
else /* fork failed */
{
perror("fork failed");
return 1;
}
printf("parent: exiting\n");
return 0;
}
We're going to look at 4 methods of interprocess communication:
- Shared memory
- Processes have access to a common block of memory
- Processes can read and write to the shared memory
- Very fast, but there may be synchronization issues (e.g. two process writing at the same time)
- Message passing
- Information passed between processes via the kernel
- Requires a message protocol
- Safer, but slower (the kernel synchronizes access)
- POSIX pipes
- Two processes can communicate using read and write functions.
- Simple. It is just as if they were reading/writing stdin/stdout.
- Sockets
- Similar to both message passing and pipes.
- Can be used by processes on different computers (over the network/Internet)
- Uses read and write for communication between processes.
1. Shared memory
- Allows for a block of memory to be shared between multiple processes
- shmget is used to create (or retrieve if already created) a block of memory
- Returns an identifier for the block
- shmat attaches the memory to the process
- Returns the address of the memory block
- shmdt detaches the memory from the process
- shmctl is used to delete the memory block
- All of these functions return -1 if an error occurs.
- Make sure you check the return values to detect any errors.
- Shared memory example: (shared.c)
In order to keep these examples simple and understandable, most error handling has been removed. In a real-world
program (like the homework assignments), failing to check the return values of these IPC functions can result
in a lot of debugging because something failed. Also, failing to check the return values will cause you to receive
a lower grade on your assignments.
#include <stdio.h> /* printf */
#include <stdlib.h> /* exit */
#include <string.h> /* strcpy */
#include <unistd.h> /* sleep, fork */
#include <sys/shm.h> /* shmget, shmat, shmdt, shmctl */
#include <sys/wait.h> /* wait */
int main(void)
{
int pid;
int shmid; /* return value from fork/shmget */
char *buffer; /* shared buffer */
key_t key = 123; /* arbitrary key (0x7b) */
shmid = shmget(key, 1024, 0600 | IPC_CREAT);
buffer = (char *) shmat(shmid, NULL, 0);
strcpy(buffer,"");
pid = fork();
if (pid == 0) /* child */
{
printf("child: putting message in buffer\n");
strcpy(buffer, "There's a fine line between clever and stupid.");
shmdt(buffer); /* detach memory from child process */
printf("child: sleeping for 5 seconds...\n");
sleep(5);
printf("child: exiting\n");
exit(0);
}
else /* parent */
{
printf("parent: waiting for child to exit...\n");
wait(NULL);
printf("parent: message from child is %s\n", buffer);
shmdt(buffer); /* detach memory from parent process */
shmctl(shmid, IPC_RMID, 0); /* delete memory block */
printf("parent: exiting\n");
}
return 0;
}
Output:
parent: waiting for child to exit...
child: putting message in buffer
child: sleeping for 5 seconds...
child: exiting
parent: message from child is There's a fine line between clever and stupid.
parent: exiting
Header file sys/shm.h needed for shared memory functions.
Shared memory has file-style permissions.
- user/group/other, 3 bits each (9 bits total).
- 6 = 110 (binary) = rw- so 600 = rw-------
Each process must know the id of the shared memory block.
Use the command ipcs
to see shared memory in use.
- Run it with the -l option (that's a lowercase 'L') to see system defaults.
Use the command ipcrm
to delete shared memory.
Note: If your program doesn't release the shared memory (e.g. due to it crashing),
you must remove it manually or subsequent attempts to create the shared memory
may fail.
This is especially true if you create the memory exclusively:
shmid = shmget(key, 1024, 0600 | IPC_CREAT | IPC_EXCL);
In any event, make sure you are checking the return value from shmget so that
if the call fails, you won't waste time wondering why your program is not working.
If you want to guarantee that your key isn't already in use, you can provide IPC_PRIVATE
as the key:
shmid = shmget(IPC_PRIVATE, 1024, 0600);
which impiles IPC_CREAT and IPC_EXCL. You
can also generate (almost) unique keys using
ftok.
This example also shows how to create shared memory between processes using the Win32 API.
It's only sharing a single integer between the processes.
This code is the parent process and this code is
for the child processes.
Comparing malloc with shared memory:
| malloc | | shared memory |
|---|
#include <stdio.h> /* perror */
#include <stdlib.h> /* malloc, free, exit */
void f1(void)
{
char *buffer; /* non-shared buffer */
/* Allocate memory */
buffer = malloc(1024);
if (!buffer)
{
perror("malloc");
exit(3);
}
/* Use the memory as you normally would */
free(buffer); /* Free the memory block */
}
|
|
#include <stdio.h> /* perror */
#include <stdlib.h> /* exit */
#include <sys/shm.h> /* shmget, shmat, shmdt, shmctl */
void f2(void)
{
char *buffer; /* shared buffer */
int shmid; /* return value from shmget */
key_t key = 123; /* arbitrary key (0x7b) */
/* Allocate memory */
shmid = shmget(key, 1024, 0600 | IPC_CREAT);
if (shmid == -1)
{
perror("shmget");
exit(1);
}
/* Attach to it */
buffer = (char *) shmat(shmid, NULL, 0);
if (buffer == (char *)-1)
{
perror("shmat");
shmctl(shmid, IPC_RMID, 0); /* free memory block */
exit(2);
}
/* Use the memory as you normally would */
shmdt(buffer); /* Detach from the memory */
shmctl(shmid, IPC_RMID, 0); /* Free the memory block */
}
|
Using shared memory (compare to malloc) requires a little extra work because you have to attach to the
memory before using it and detach before freeing it. The overhead is negligible.
Shown again without any error handling:
| malloc | | shared memory |
|---|
void f1(void)
{
char *buffer; /* non-shared buffer */
buffer = malloc(1024); /* Allocate memory */
/* Use the memory as you normally would */
free(buffer); /* Free the memory block */
}
|
|
void f2(void)
{
char *buffer; /* shared buffer */
int shmid; /* return value from shmget */
key_t key = 123; /* arbitrary key (0x7b) */
shmid = shmget(key, 1024, 0600 | IPC_CREAT); /* Allocate memory */
buffer = (char *) shmat(shmid, NULL, 0); /* Attach to it */
/* Use the memory as you normally would */
shmdt(buffer); /* Detach from the memory */
shmctl(shmid, IPC_RMID, 0); /* Free the memory block */
}
|
Because shared memory acts exactly the same as "normal" memory, there is no learning curve
in using it. It is the simplest (and fastest) form of IPC.
Message queues
- Allows for passing messages between processes
- msgget creates (or retrieves an existing) message queue
- Returns an identifier for the queue
- msgsnd posts a message to the queue
- msgrcv retrieves (and removes) a message from the queue
- msgctl is used to delete the message queue
- All of these functions return -1 if an error occurred.
- Technically, these are not POSIX message queues, they are System V message queues.
- Sys V message queues have been around Forever™ and are implemented just about everywhere.
- POSIX queues are newer and are not as ubiquitous yet.
- The interfaces and capabilities are similar, but POSIX queues have more features (and, therefore, a little more complicated).
- Message queue memory example: (msg.c)
#include <stdio.h> /* printf */
#include <stdlib.h> /* exit */
#include <string.h> /* strcpy */
#include <unistd.h> /* fork */
#include <sys/msg.h> /* msgget, msgsnd, msgrcv, msgctl */
#include <sys/wait.h> /* wait */
#define BUFSIZE 1024
#define MSG_STRUCT 1
/* Our user-defined structure */
typedef struct
{
long int type; /* must be long int */
char buffer[BUFSIZE]; /* can be anything */
}msg_struct;
int main(void)
{
int pid;
int queue_id; /* shared id */
msg_struct msg; /* our message */
key_t key = 123; /* arbitrary key */
queue_id = msgget(key, 0600 | IPC_CREAT);
pid = fork();
if (pid == 0) /* child */
{
printf("child: sending messages\n");
msg.type = MSG_STRUCT;
strcpy(msg.buffer, "This is message number one...");
msgsnd(queue_id, &msg, BUFSIZE, 0);
sleep(5);
strcpy(msg.buffer, "This is message number two...");
msgsnd(queue_id, &msg, BUFSIZE, 0);
sleep(5);
printf("child: exiting\n");
exit(0);
}
else /* parent */
{
/*sleep(2);*/
printf("parent: waiting on child\n");
wait(NULL);
printf("parent: receiving messages\n");
while (msgrcv(queue_id, &msg, BUFSIZE, 0, IPC_NOWAIT) != -1)
{
if (msg.type == MSG_STRUCT)
printf("message: %s\n", msg.buffer);
else
printf("unknown message\n");
}
msgctl(queue_id, IPC_RMID, NULL);
printf("parent: exiting\n");
}
return 0;
}
Output:
parent: waiting on child
child: sending messages
child: exiting
parent: receiving messages
message: This is message number one...
message: This is message number two...
parent: exiting
A more real-world example without using parent-child processes:
Shared data: (in a header file, client-server-msg.h)
#define BUFSIZE 1024
#define MSG_STRUCT 1
#define MSG_QUIT 2
#define SHARED_KEY 12345 /* 0x3039 */
typedef struct
{
long int type; /* must be long int */
char buffer[BUFSIZE]; /* can be anything */
}msg_struct;
Process #1 code (Sending process, msg-client.c)
#include <stdio.h> /* printf, sprintf */
#include <unistd.h> /* sleep */
#include <sys/msg.h> /* msgget, msgsnd, msgctl */
#include "client-server-msg.h" /* shared data */
int main(void)
{
int i;
key_t key = SHARED_KEY;
msg_struct msg;
int queue_id = msgget(key, 0600 | IPC_CREAT);
msg.type = MSG_STRUCT;
for (i = 0; i < 10; i++)
{
printf("client writing: %i\n", i);
sprintf(msg.buffer, "Hello %i", i);
msgsnd(queue_id, &msg, BUFSIZE, 0);
sleep(1);
}
printf("client writing end message\n");
msg.type = MSG_QUIT;
msgsnd(queue_id, &msg, BUFSIZE, 0);
return 0;
}
Process #2 code (Receiving process, msg-server.c)
#include <stdio.h> /* printf */
#include <sys/msg.h> /* msgget, msgrcv, msgctl */
#include "client-server-msg.h" /* shared data */
int main(void)
{
msg_struct msg;
key_t key = SHARED_KEY;
int queue_id = msgget(key, 0600 | IPC_CREAT);
int done = 0;
while(!done)
{
/* If no message is waiting, msgrcv returns -1 */
while (msgrcv(queue_id, &msg, BUFSIZE, 0, 0 /*IPC_NOWAIT*/) != -1)
{
if (msg.type == MSG_STRUCT)
printf("message: %s\n", msg.buffer);
else if ( msg.type == MSG_QUIT ) /* Remove if you want the server */
{ /* to run indefinitely */
done = 1;
break;
}
else
printf("unknown message\n");
}
}
printf("server shutting down\n");
msgctl(queue_id, IPC_RMID, NULL);
return 0;
}
| Sending process | | Receiving process |
|---|
client writing: 0
client writing: 1
client writing: 2
client writing: 3
client writing: 4
client writing: 5
client writing: 6
client writing: 7
client writing: 8
client writing: 9
client writing end message
|
|
message: Hello 0
message: Hello 1
message: Hello 2
message: Hello 3
message: Hello 4
message: Hello 5
message: Hello 6
message: Hello 7
message: Hello 8
message: Hello 9
server shutting down
|
Header file sys/msg.h must be included.
Each process must know the key value of the queue. In the example it's 12345 (0x3039)
Queue has file-style permissions.
msgrcv has two modes:
- IPC_NOWAIT: returns -1 if there are no messages on the queue (non-blocking)
- not IPC_NOWAIT: blocks until there is a message on the queue
- Like the wait function, if the process that is receiving the message has
nothing else to do, it should just block, otherwise it could waste cycles
on the CPU core.
Messages can have different structures
A message structure must have a long int as its first field (used for the message type identifier)
- Any number and type of fields can follow the type identifier.
Message size (specified in msgsnd and msgrcv) is the message structure size without the long int identifier
Use the command ipcs to see message queues in use.
- Run it with the -l option (that's a lowercase 'L') to see system defaults.
- See also /proc/sys/kernel/msg*
- To monitor the queues: watch -n.5 ipcs -q
- To remove a queue, use ipcrm:
ipcrm -q <msqid>
Video review - See the above code in a real-time demo.
POSIX pipes
- A pipe is a stream of communication between two processes.
- These commmands from the terminal:
ls | wc
can be pictured like this (from The Linux Programming Interface book)
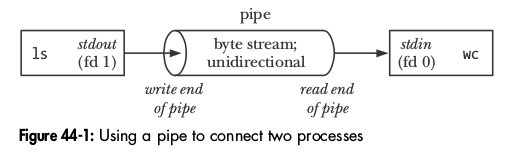
- You can think of it as a virtual file stream shared between two processes.
- A process can read and/or write to a pipe.
- Two processes can communicate via a pipe without even knowing it.
- This forms the backbone of Unix-like environments.
- This includes Unix, Linux, Cygwin, macOS, iOS, Android, among others.
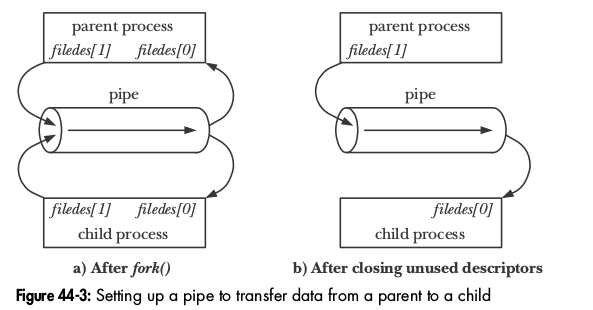
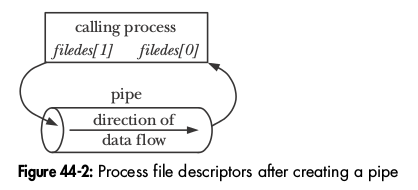
- The pipe function returns two descriptors (integers) in the (out) parameter
- Both processes must know the descriptors.
- read and write are used with the pipe.
- This makes communication trivial as each process is just reading and writing files.
- From The Linux Programming Interface book:
- pipe example: (pipe1.c)
#include <stdio.h> /* printf, fgets */
#include <stdlib.h> /* exit */
#include <string.h> /* strlen */
#include <unistd.h> /* fork, pipe, read, write, close */
#include <sys/wait.h> /* wait */
int main(void)
{
int pid;
char buffer[1024];
int fd[2];
pipe(fd); /* fd[0] is for read, fd[1] is for write */
pid = fork();
if (pid == 0) /* child */
{
int count;
close(fd[0]); /* close unused end (read), child will write */
/* prompt user for input */
printf("input: ");
fgets(buffer, sizeof(buffer), stdin);
printf("child: message is %s", buffer);
/* write to the pipe (include NUL terminator!) */
count = write(fd[1], buffer, strlen(buffer) + 1);
printf("child: wrote %i bytes\n", count);
exit(0);
}
else /* parent */
{
int count;
close(fd[1]); /* close unused end (write), parent will read */
/* read from the pipe */
count = read(fd[0], buffer, sizeof(buffer));
printf("parent: message is %s", buffer);
printf("parent: read %i bytes\n", count);
wait(NULL); /* reap the child */
}
return 0;
}
Output: (User types 22 characters)
input: This is from teh user!
child: message is This is from teh user!
child: wrote 24 bytes
parent: message is This is from teh user!
parent: read 24 bytes
Output:
input: 12345
child: message is 12345
child: wrote 7 bytes
parent: message is 12345
parent: read 7 bytes
- The unistd.h (POSIX) header file needs to be included for the pipe, read, and write functions.
- The pipe function fills in the descriptor array.
- descriptor[0] is for reading from the pipe
- descriptor[1] is for writing to the pipe
- An ordinary (anonymous) pipe cannot be accessed from outside the process that created it.
- A parent will create a pipe, then fork so the child can access it.
- Child processes inherit all open files (pipes are a special kind of file) from the parent.
- These will persist across calls to the exec functions (can be disabled).
- Once the processes end, the pipes no longer exist.
- Ordinary pipes can only be used with processes on the same machine.
- Named pipesNamed pipes are more powerful than ordinary (or anonymous) pipes.
- They can be used by several processes at once.
- They don't require a parent-child relationship.
- They exist independently of the process that created them.
- Much like how files created on the disk by a process exist after the process ends.
- See mkfifo on Unix-based systems and
CreateNamedPipe on Windows
Self check: Programming Problem 3.18 from the suggested textbook.
"Design a program using ordinary pipes in which one process sends a string message
to a second process, and the second process reverses the case of each character in
the message and sends it back to the first process. For example, if the first process
sends the message Hi There, the second process will return hI tHERE.
This will require using two pipes, one for sending the original message from the
first to the second process, and the other for sending the modified message from
the second back to the first process."
#include <stdio.h> /* printf, fgets */
#include <stdlib.h> /* exit */
#include <string.h> /* strlen */
#include <ctype.h> /* isalpha, toupper */
#include <unistd.h> /* pipe, read, write, close */
#include <sys/wait.h> /* wait */
void revcase(char *buffer)
{
int i;
int len = strlen(buffer);
for (i = 0; i < len; i++)
{
if (isupper(buffer[i]))
buffer[i] = tolower(buffer[i]);
else if (islower(buffer[i]))
buffer[i] = toupper(buffer[i]);
}
}
int main(void)
{
int pid;
/* setup stuff */
pid = fork();
if (pid == 0) /* child */
{
/* DO STUFF */
exit(0);
}
else /* parent */
{
/* DO STUFF */
wait(NULL);
}
return 0;
}
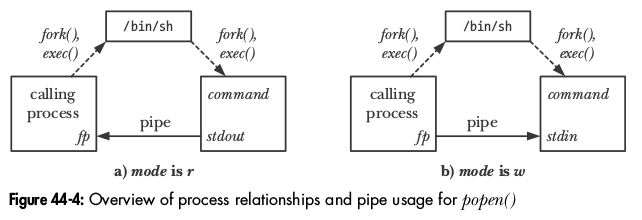
If you just need to setup a pipe between two processes, there is a function called
popen which makes things easier. It basically performs the
fork, exec, and pipe stuff for you. Since many programs just need this
kind of behavior, it can be a real convenience.
This sample code simply prints out the strings: one two three four five six seven to the
screen (stdout): (popen0.c)
#include <stdio.h> /* printf */
int main(void)
{
int i;
char *array[] = {"one", "two", "three", "four", "five", "six", "seven"};
int size = sizeof(array) / sizeof(*array);
/* Print to stdout */
for(i = 0; i < size; i++)
printf("%s\n", array[i]);
return 0;
}
Output:
one
two
three
four
five
six
seven
If we wanted the output sorted, we would pipe the output to the
standard sort program that is available on all
POSIX systems using the pipe symbol:
./popen0 | sort
Output:
five
four
one
seven
six
three
two
But, suppose we wanted to sort the data within our program and not require the user
to have to do the piping on the command line? That's where the popen function comes
in handy.
This example shows how you can use the sort program to sort your data from within your program. So, instead of using printf to
print to stdout, we're using fprintf to print to the sort process! (popen1.c)
/* compile with -D_BSD_SOURCE if using -ansi */
#include <stdio.h> /* fprintf, popen, pclose, perror */
int main(void)
{
int i;
FILE *pfp;
char *array[] = {"one", "two", "three", "four", "five", "six", "seven"};
int size = sizeof(array) / sizeof(*array);
/* Create write-only pipe (i.e. open program for writing) */
pfp = popen("sort", "w");
if (!pfp)
{
perror("popen");
return 1;
}
/* Print to pipe (write to sort process) */
for(i = 0; i < size; i++)
fprintf(pfp, "%s\n", array[i]);
/* Close the pipe */
pclose(pfp);
return 0;
}
Output:
five
four
one
seven
six
three
two
Diagram from The Linux Programming Interface book:
This example shows how you can setup a pipe within your C program just as if you
were using the command line: (popen2.c) This is equivalent to the command line:
ls /usr/bin | sort -r
/* compile with -D_BSD_SOURCE if using -ansi */
#include <stdio.h> /* popen, perror, fprintf, pclose, fgets */
#define BUFSIZE 100
int main(void)
{
FILE *inpipe, *outpipe;
char buffer[BUFSIZE];
/* read pipe from ls (i.e. open ls program for reading) */
inpipe = popen("ls /usr/bin", "r");
if (!inpipe)
{
perror("popen read:");
return 1;
}
/* write pipe to sort (i.e. open sort program for writing) */
outpipe = popen("sort -r", "w");
if (!outpipe)
{
perror("popen write:");
return 2;
}
/* read from ls and write to sort (reversed) */
/* it's this: ls /usr/bin | sort -r */
while(fgets(buffer, BUFSIZE, inpipe))
fprintf(outpipe, "%s", buffer);
/* clean up */
pclose(inpipe);
pclose(outpipe);
return 0;
}
Partial output:
zxpdf
zsoelim
zsh
zrun
zlib-flate
zjsdecode
zipsplit
zipnote
zipinfo
zipgrep
zipdetails
zipcloak
zip
zim
.
.
.
aainfo
aaflip
aafire
a5toa4
a5booklet
a2ping
a2p
7zr
7za
7z
2to3-3.4
2to3-2.7
2to3
[
On my system there are over 4,000 lines!
Capturing output from the compiler: (popen3.c)
/* compile with -D_BSD_SOURCE if using -ansi */
#include <stdio.h> /* popen, perror, printf, pclose, fgets */
#define BUFSIZE 100
int main(void)
{
FILE *inpipe;
char buffer[BUFSIZE];
/* read pipe from gcc */
inpipe = popen("gcc foo.c", "r");
if (!inpipe)
{
perror("popen read:");
return 1;
}
/* Read from compiler and output to screen */
while(fgets(buffer, BUFSIZE, inpipe))
printf("%s", buffer);
/* clean up */
pclose(inpipe);
return 0;
}
This is foo.c:
int main(void)
{
return; /* Missing return value */
}
Output:
foo.c: In function 'main':
foo.c:3:3: warning: 'return' with no value, in function returning non-void
return;
^
With this knowledge, you can now you can start writing your own IDE (e.g. Visual Studio)!
Create your own IDE on Windows with child processes
and pipes.
- Creates a child process (doesn't fork like Unix-based systems).
- Uses an existing program as child process (much like exec).
- Non-blocking: parent code continues to execute after child process is created.
- Parent uses WaitForSingleObject to wait for one child
- WaitForMultipleObjects used by parent to wait for multiple children
- Win32 lacks a fork function, but Cygwin implements one (by way of voodoo and black magic, and it's inefficient).
CreateProcess Example (CreateProcess.cpp)
#include <iostream>
#include <windows.h>
int main(void)
{
STARTUPINFO start_info;
PROCESS _INFORMATION proc_info;
DWORD pid = GetCurrentProcessId();
std::cout << "parent pid = " << pid << std::endl;
// allocate memory and set to 0
ZeroMemory(&start_info, sizeof(STARTUPINFO));
ZeroMemory(&proc_info, sizeof(PROCESS_INFORMATION));
std::cout << "creating child process" << std::endl;
const char *program = "c:\\windows\\system32\\notepad.exe";
BOOL err = CreateProcess(program, // program to run
0, // command line
0, // security attributes
0, // thread attributes
FALSE, // don't inherit handles
0, // creation flags (none)
0, // use parent's environment
0, // use parent's directory
&start_info, // start up info
&proc_info // process info
);
if (!err)
{
std::cout << "Error creating process" << std::endl;
return -1;
}
std::cout << "waiting for child to terminate" << std::endl;
WaitForSingleObject(proc_info.hProcess, INFINITE);
std::cout << "parent terminating" << std::endl;
CloseHandle(proc_info.hProcess);
CloseHandle(proc_info.hThread);
return 0;
}
Creating Multiple Processes Example
#include <stdio.h>
#include <windows.h>
int main(void)
{
const int COUNT = 2;
HANDLE proc[COUNT], thread[COUNT];
const char *programs[] = {"c:\\windows\\system32\\notepad.exe",
"c:\\windows\\system32\\mspaint.exe",
};
for (int i = 0; i < COUNT; ++i)
{
STARTUPINFO si;
PROCESS_INFORMATION pi;
ZeroMemory(&si, sizeof(si));
ZeroMemory(&pi, sizeof(pi));
CreateProcess(programs[i], 0, 0, 0, FALSE, 0, 0, 0, &si, &pi);
proc[i] = pi.hProcess;
thread[i] = pi.hThread;
}
WaitForMultipleObjects(COUNT, proc, TRUE, INFINITE);
for (int i = 0; i < COUNT; ++i)
{
printf("Process: %i, Thread: %i ended.\n", proc[i], thread[i]);
CloseHandle(proc[i]);
CloseHandle(thread[i]);
}
return 0;
}
{kind=link}